Vision
"Memberikan Solusi Terhadap Pendidikan, Training dan Pelatihan Kelistrikan Elektronika"
Mission
1. Menjadikan Pendidikan dan Pelatihan lebih mudah dan menyenangkan
By:
.jpg)

Angga Fuja Widia, Arif Nurahman, Bambang Achdiyat dan Rizkiyana Murbakara
Department of Physics
Faculty of Sciences and Mathematics, Indonesia University of Education
and
Follower Open Course Ware at Massachusetts Institute of Technology
Cambridge, USA
Department of Physics
http://web.mit.edu/physics/
http://ocw.mit.edu/OcwWeb/Physics/index.htm
&
Aeronautics and Astronautics Engineering
http://web.mit.edu/aeroastro/www/
http://ocw.mit.edu/OcwWeb/Aeronautics-and-Astronautics/index.htm




http://www.elektroindonesia.com/elektro/elektro.html
| ||||||||||||


Analisis Kegagalan Minyak Transformator
Mekanisme Kegagalan Isolasi Cair
Beberapa macam faktor yang diperkirakan mempengaruhi kegagalan minyak transformator seperti luas daerah elektroda, jarak celah (gap spacing), pendinginan, perawatan sebelum pemakaian (elektroda dan minyak ), pengaruh kekuatan dielektrik dari minyak transformator yang diukur serta kondisi pengujian atau minyak transformator itu sendiri juga mempengaruhi kekuatan dielektrik minyak transformator.
Kegagalan isolasi (insulation breakdown, insulation failure) disebabkan karena beberapa hal antara lain isolasi tersebut sudah lama dipakai, berkurangnya kekuatan dielektrik dan karena isolasi tersebut dikenakan tegangan lebih. Pada perinsipnya tegangan pada isolator merupakan suatu tarikan atau tekanan (stress) yang harus dilawan oleh gaya dalam isolator itu sendiri agar supaya isolator tidak gagal. Dalam struktur molekul material isolasi, elektron-elektron terikat erat pada molekulnya, dan ikatan ini mengadakan perlawanan terhadap tekanan yang disebabkan oleh adanya tegangan. Bila ikatan ini putus pada suatu tempat maka sifat isolasi pada tempat itu hilang. Bila pada bahan isolasi tersebut diberikan tegangan akan terjadi perpindahan elektron-elektron dari suatu molekul ke molekul lainnya sehingga timbul arus konduksi atau arus bocor. Karakteristik isolator akan berubah bila material tersebut kemasukan suatu ketidakmurnian (impurity) seperti adanya arang atau kelembaban dalam isolasi yang dapat menurunkan tegangan gagal.
Gradien tegangan dv/dx yang melalui sebuah isolator tidak konstan walaupun elektrodanya adalah pelat pelat sejajar, gradien tegangan paling curam terjadi dekat kepingan-kepingan. Bila dimensinya besar dibandingkan dengan jarak antara kedua pelat maka pada bagian tengah antara kedua pelat gradiennya seragam.
Berikut ini beberapa faktor yang mempengaruhi mekanisme kegagalan yaitu :
- Partikel
- Air
- Gelembung
Ketidak murnian memegang peranan penting dalam kegagalan isolasi. Partikel debu atau serat selulosa dari sekeliling dielektrik padat selalu tertinggal dalam cairan. Apabila diberikan suatu medan listrik maka partikal ini akan terpolarisasi. Jika partikel ini memiliki permitivitas e 2 yang lebih besar dari permitivitas carian e 1, suatu gaya akan terjadi pada partikel yang mengarahkannya ke daerah yang memiliki tekanan elektris maksimum diantara elektroda elektroda. Untuk partikel berbentuk bola (sphere) dengan jari jari r maka besar gaya F adalah :
Jika partikel tersebut lembab atau basah maka gaya ini makin kuat karena permitivitas air tinggi. Partikel yang lain akan tertarik ke daerah yang bertekanan tinggi hingga partikel partikel tersebut bertautan satu dengan lainnya karena adanya medan. Hal ini menyebabkan terbentuknya jembatan hubung singkat antara elektroda. Arus yang mengalir sepanjang jembatan ini menghasilkan pemanasan lokal dan menyebabkan kegagalan.
Air yang dimaksud adalah berbeda dengan partikel yang lembab. Air sendiri akan ada dalam minyak yang sedang beroperasi/dipakai. Namun demikian pada kondisi operasi normal, peralatan cenderung untuk mambatasi kelembaban hingga nilainya kurang dari 10 %. Medan listrik akan menyebabkan tetesan air yang tertahan didalam minyak yang memanjang searah medan dan pada medan yang kritis, tetesan itu menjadi tidak stabil. Kanal kegagalan akan menjalar dari ujung tetesan yang memanjang sehingga menghasilkan kegagalan total.
Pada gelembung dapat terbentuk kantung kantung gas yang terdapat dalam lubang atau retakan permukaan elektroda, yang dengan penguraian molekul molekul cairan menghasilkan gas atau dengan penguatan cairan lokal melalui emisi elektron dari ujung tajam katoda. Gaya elektrostatis sepanjang gelembung segera terbentuk dan ketika kekuatan kegagalan gas lebih rendah dari cairan, medan yang ada dalam gelembung melebihi kekuatan uap yang menghasilakn lebih banyak uap dan gelembung sehingga membentuk jembatan pada seluruh celah yang menyebabkan terjadinya pelepasan secara sempurna.
Sifat sifat listrik yang menentukan unjuk kerja cairan sebagai isolasi adalah :
- Withstand Breakdown kemampuan untuk tidak mengalami kegagalan dalam kondisi tekanan listrik (electric stress ) yang tinggi.
- Kapasitansi Listrik per unit volume yang menentukan permitivitas relatifnya.
- Faktor daya
Minyak petroleum merupakan subtansi nonpolar yang efektif karena meruapakan campuran cairan hidrokarbon. Minyak ini memiliki permitivitas kira-kira 2 atau 2.5 . Ketidak bergantungan permitivitas subtansi nonpolar pada frekuensi membuat bahan ini lebih banyak dipakai dibandingkan dengan bahan yang bersifat polar. Misalnya air memiliki permitivitas 78 untuk frekuensi 50 Hz, namun hanya memiliki permitivitas 5 untuk gelombang mikro.
Faktor dissipasi daya dari minyak dibawah tekanan bolak balik dan tinggi akan menentukan unjuk kerjanya karena dalam kondisi berbeban terdapat sejumlah rugi rugi dielektrik. Faktor dissipasi sebagai ukuran rugi rugi daya merupakan parameter yang penting bagi kabel dan kapasitor. Minyak transformator murni memiliki faktor dissipasi yang bervariasi antara 10-4 pada 20 oC dan 10-3 pada 90oC pada frekuensi 50 Hz.
- Resistivitas
Suatu cairan dapat digolongkan sebagai isolasi cair bila resitivitasnya lebih besar dari 109
W-m. Pada sistem tegangan tinggi resistivitas yang diperlukan untuk material isolasi adalah 1016 W-m atau lebih. (W=ohm)
Kekuatan Dielektrik
Dalam upaya memberikan gambaran tentang kekuatan dielektrik maka akan lebih memudahkan bila dua dielektrik seri ditinjau. Dalam hal ini medan dianggap seragam, arus bocor diabaikan dan konsentrasi fluks pada pinggiran juga diabaikan.
Oleh karena perpindahan (displacement) netral sama, maka :
En1 En2 Dn1=Dn2
e1En1=e2En2
x1 x2 En1=(v1/x1) dan En2=(v2/x2)
e1, e2 adalah permitivitas
v1, v2 adalah tegangan tiap dielektrik
Jika n buah dielektrik dalam hubungan seri maka gradien atau kuat medannya pada titik x adalah :
Jika terdapat lapisan udara, minyak dan padat yang tebalnya 0.5 inci dengan permitivitas masing-masing 1, 2 dan 4; tegangan V=280 kV. Berdasarkan rumus diatas gradien tegangan udara 320 volt/mil, minyak 160 volt/mil dan bahan padat 80 volt/mil. Oleh karena itu udara mulai gagal saat 54 volt/mil, minyak pada saat 200 volt/mil dan bahan padat pada saat 25- - 300 volt/mil.
Pengujian Kualitas Minyak Transformator
- Pengujian kekuatan elektrik minyak Transformator
- Jarak elektroda 2.5 mm
- Bejana dan elektroda harus benar-benar kering dan bersih setiap sebelum pengujian, elektroda harus dicuci dengan minyak transformator yang akan diuji.
- Minyak yang akan diuji harus diambil dengan alat yang benar-benar bersih, minyak pertama yang keluar dibuang supaya kran-kran menjadi bersih. Minyak lama pada waktu pertama alirannya dibuang.
- Botol tempat minyak transformator ditutup dengan lilin supaya kotoran dan uap air tidak masuk.
Kekuatan listrik merupakan karakteristik penting dalam material isolasi. Jika kekuatan listrik rendah minyak transformator dikatakan memiliki mutu yang jelek. Hal ini sering terjadi jika air dan pengotor ada dalam minyak transformator. Pengujian perlu dilakukan untuk mengetahui kegagalan minyak transformator.
Beberapa hal yang perlu diperhatikan dalam melakukan uji kegagalan ini antara lain:
- Pengujian Viskositas Minyak Transformator
- Titik Nyala (flash point)
- Pemurnian Minyak Transformator
Viskositas minyak adalah suatu hal yang sangat penting karena minyak transformator yang baik akan memiliki viskositas yang rendah, sehingga dapat bersirkulasi dengan baik dan akhirnya pendinginan inti dan belitan trasformator dapat berlangsung dengan baik pula.
Temperatur ini adalah temperatur campuran antara uap dari minyak dan udara yang akan meledak (terbakar) bila didekati dengan bunga api kecil. Untuk mencegah kemungkinan timbulnya kebakaran dari peralatan dipilih minyak dengan titik nyala yang tinggi. Titik nyala dari minyak yang baru tidak boleh lebih kecil dari 135 oC, sedangkan suhu minyak bekas tidak boleh kurang dari 130 oC. Untuk mengetahui titik nyala minyak transformator dapat ditentukan dengan menggunakan alat Close up tester.
Minyak transformator dapat terkontaminasi oleh berbagai macam pengotor seperti kelembaban, serat, resin dan sebagainya. Ketidakmurnian dapat tinggal di dalam minyak karena pemurnian yang tidak sempurna. Pengotoran dapat terjadi saat pengangkutan dan penyimpanan, ketika pemakaian, dan minyak itu sendiri pun dapat membuat pengotoran pada dirinya sendiri.
a). Mendidihkan (boiling)
- Minyak dipanaskan hingga titik didih air dalam alat yang disebut Boiler. Air yang ada dalam minyak akan menguap karena titik didih minyak lebih tinggi dari pada titik didih air. Metode ini merupakan metode yang paling sederhana namun memiliki kekurangan. Pertama hanya air yang dipindahkan dari minyak, sedangkan serat, arang dan pengotor lainnya tetap tinggal. Kedua minyak dapat menua dengan cepat karena suhu tinggi dan adanya udara.
Kekurangan yang kedua dapat diatasi dengan sebuah boiler minyak hampa udara (vacum oil boiler). Alat ini dipakai dengan minyak yang dipanaskan dalam bejana udara sempit (air tight vessel) dimana udara dipindahkan bersama dengan air yang menguap dari minyak. Air mendidih pada suhu rendah dalam ruang hampa oleh sebab itu menguap lebih cepat ketika minyak dididihkan dalam alat ini pada suhu yang relatif rendah. Alat ini tidak menghilangkan kotoran pada kendala pertama, sehingga pengotor tetap tinggal.
- Air serat, karbon dan lumpur yang lebih berat dari minyak dapat dipindahkan minyak setelah mengendap. Untuk masalah ini memerlukan waktu lama, sehingga untuk mempercepatnya minyak dipanaskan hingga 45 - 55 oC dan diputar dengan cepat dalam alat sentrifugal. Pengotor akan tertekan ke sisi bejana oleh gaya sentrifugal, sedangkan minyak yang bersih akan tetap berada ditengah bejana. Alat ini mempunyai efesiensi yang tinggi. Alat sentrifugal hampa merupakan pengembangannya.
Bagian utama dari drum adalah drum dengan sejumlah besar piring / pelat (hingga 50) yang dipasang pada poros vertikal dan berputar bersama-sama. Karena piring mempunyai spasi sepersepuluh millimeter, piring piring ini membawa minyak karena gesekan dan pengotor berat ditekan keluar.
- Dengan metode ini minyak disaring melalui kertas penyaring sehingga pengotor tidak dapat melalui pori-pori penyaring yang kecil, sementara embun atau uap telah diserap oleh kertas yang mempunyai hygroscopicity yang tinggi. Jadi filter press ini sangat efesien memindahkan pengotor padat dan uap dari minyak yang merupakan kelebihan dari pada alat sentrifugal. Walaupun cara ini sederhana dan lebih mudah untuk dilakukan, keluaran yang dihasilkan lebih sedikit jika dibandingkan dengan alat sentrifugal yang menggunakan kapasitas motor penggerak yang sama. Filter press ini cocok digunakan untuk memisahkan minyak dalam circuit breaker (CB), yang biasanya tercemari oleh partikel jelaga (arang) yang kecil dan sulit dipisahkan dengan menggunakan alat sentrifugal.
- Produk-produk penuaan tidak dapat dipindahkan dari minyak dengan cara sebelumnya. Penyaringan hanya baik untuk memindahkan bagian endapan yang masih tersisa dalam minyak. Semua sifat sifat minyak yang tercemar dapat dipindahkan dengan pemurnian menyeluruh yang khusus yang disebut regenerasi.
Dalam dengan menggunakan absorben untuk regenerasi minyak transformator sering dipakai di gardu induk dan pembangkit. Adsorben adalah substansi yang partikel partikelnya dapat menyerap produk produk penuaan dan kelembaban pada permukaannya. Hal yang sama dilakukan adsorben dalam ruang penyaring tabung gas yang menyerap gas beracun dan membiarkan udara bersih mengalir. Regenerasi dengan adsorben dapat dilakukan lebih menyeluruh bila minyak dicampur dengan asam sulfur.
- Pertama, minyak yang dipanasi dapat dicampur secara menyeluruh dengan adsorben yang dihancurkan dan kemudian disaring.
- Kedua, minyak yang dipanaskan dapat dilewatkan melalui lapisan tebal adsorben yang disebut perkolasi.
Transformator tentunya harus diistirahatkan (deenergized) ketika minyaknya akan dimurnikan atau diregenerasi dengan salah satu metode diatas, walaupun demikian hal di atas dapat dilaksanakan dalam keadaan berbeban jika dilakukan perlakuan khusus. Pengembangan metode regenerasi minyak transformator dalam kedaan berbeban adalah dengan filter pemindah pemanas (thermal siphon filter) yang dihubungkan dengan tangki minyak transformator. Filter ini diisi dengan adsorben sebanyak 1 % dari berat minyak transformator.
Pengukuran Konduktivitas Arus Searah Minyak Tansformator
S1=q1n1E
Susunan elektroda yang dgunakan dalam mengukur nilai k harus dilengkapi dengan elektroda cincin pengaman untuk menghilangkan pengaruh pada bidang batas dan arus arus permukaan yang dibumikan secara langsung.
Gambar susunan elektroda untuk tegangan searah
1.Elektroda tegangan tinggi
2.Elektroda ukur
3.Elektroda cincin pengaman
Medan elektrik sedapat mungkin dibuat homogen. Disamping elektroda pelat umumnya digunakan elektroda selinder koaksial. Jika diterapkan tegangan U untuk medan homogen seluas A dan besar sel S maka nilai k dapat dihitung dari nilai arus I sebagai berikut
Pengukuran Faktor Dissipasi Minyak Transformator
Pdiel = U2w C tan d
Besar rugi dielektrik dapat diukur dengan jembatan Schering
Gambar Jembatan Schering Rangkaian untuk mengukur Kapasitansi dan faktor
dissipasi dengan jembatan Schering
Kapasitansi Cx dan faktor dissipasi tan d harus diukur sebagai fungsi tegangan uji U dengan menggunakan rangkaian di atas. Tegangan yang dibangkitkan oleh transformator tegangan tinggi T diukur dengan kapasitor CM dan alat ukur tegangan puncak SM. Tabung uji diparalelkan dengan kapasitor standar dengan nilai kapasitansi C2 =28 pF.
Tembus jembatan serat dalam minyak Isolasi
Gambar Jembatan Schering
Prosedur Pengujian Tegangan Gagal Minyak Transformator dengan Berbagai Macam Elektroda.
a. Pemrosesan Minyak Transformator (Oil processing)
- Kekuatan dielektrik dari minyak transformator sangat dipengaruhi oleh pemrosesan dan kondisi pengujian, karean menentukan kualitas dari minyak transformator selama pengujian. Sifat minyak akan hilang melalui uap lembab, gas, ketidakmurnian, dan pengisian kedalam tangki pengujian. Kualitas minyak harus dicek secara periodik dengan oil cup tester, sehingga dapat diperoleh informasi bahwa pengurangan kekuatan elektrik dari minyak transformator diabaikan jika tangki ditutup 4 hari. Jika kekuatan dielektrik minyak menurun dari nilai awal 65 kV/25 mm sampai 55 kV/2.5 mm, atau jika lebih dari 4 hari setelah diisi minyak, maka minyak harus diganti.
- Tegangan AC dan tegangan impuls biasanya digunakan dalam pengujian. Pengujian dengan tegangan AC dapat diperoleh dengan Steady voltage raising method dan Withstand voltage method, dengan kenaikan dari 5 sampai 10 % step, mulai 60 % dari ekspektasi breakdown voltage. Impuls voltage dibuat dengan up and down method dari 5 sampai 10 % step dari ekspektasi breakdown voltage. Probablitas pengujian kegagalan dapat diperoleh dalam 2 cara yaitu :
- Tegangan AC naik pada kegagalan dengan kecepatan konstan 3 kV/sec. Prosedur ini diulang sampai 500 kali dalam interval 1 menit.
- Voltage band antara 0 sampai 100 % breakdown voltage, yang dibagai dalam beberapa level.Tegangan Ac telah diaplikasi selama 1 menit 20 kali tiap level tegangan, sedangkan tegangan impuls telah diaplikasi 20 kali tiap level tegangan.
Analisis Kegagalan Minyak Transformator
1. Peralatan Percobaan
- Untuk memahami analisis yang dilakukan terlebih dahulu meninjau sekilas tentang prosedur dan alat percobaan yang dipakai dalam kegagalan minyak transformator.
Ada 3 jenis elektroda yang sering digunakan dalam percobaan yaitu Elektroda baja yang ringan dan kecil (berdiameter 10 mm), Elektroda kuningan-Bruce profil dengan luas daerah yang datar dan Elektroda baja selinderis koaksial dengan jarak celah dalam rentang yang lebar.
- Persiapan elekroda pertama tama adalah pencucian dengan trichloroethylene, penggosokan permukaan secara standar dengan 1000 grade kertas silikon karbid, kemudian dicuci dalam campuran air panas dan larutan sabun, pengeringan dan pemindahan debu dengan karet busa sintetis, pembilasan dengan air panas dan air suling. Elektroda dikeringkan dalam kabinet berlainan udara yang bersekat-sekat dan akhirnya digosok dengan tissue kain tiras lensa dengan memakai acetone setelah itu memakai trichloroethylene. Sisa sambungan elektroda dicuci dengan air panas dan larutan sabun dan dibilas sesuai dengan prosedur diatas tiap kali setalah pengujian.
- Semua pengujian dilakukan dengan gelombvang sinus tegangan Ac dengan frekuensi 50 Hz.Tegangan yang diberian dinaikkan secara seragam dalam semua pengujian dengan hargarata rata 2 kV/detik. Sebuag CB dihubungkan ke sisi primer transformator dengan tujuan untuk memutus arus gangguan, yang jika arus gangguan dibiarkan terlalu lama akan mengakibatkan karbonisasi dan akan melubangi elektroda.
- Stabilisasi.
- Setelah pengujian berturut turut, kekuatan dielektrik rata rata minyak mencapai tingkat yang stabil. Stabiliasi ini dipengaruhi oleh berbagai macam faktor seperti daerah elektroda, jarak celah, kualitas minya, energi yang dilepas dalam celah, elektroda pre treatment dan waktu antara kegagalan. Stabilisasi dipengaruhi oleh daerah elektroda. Untuk jenis elektroda baja selinderis yang besar, nilai stabil setelah kira kira 20 kegagalan, sedang untuk elektroda kuningan dan elektroda baja kecil, nilai menjadi stabil setelah kira kira 10 atau 5 kali kegagalan. Kualitas minyak dalam celah dapat berubah oleh sirkulasi yang kontiyu atau oleh perubahan porositas filter. Dalam banyak hal sirkulasi kontinyu minyak dalam celah selama pengujian dengan kecepatan 3 cm/detik meningkatkan persentase perbedaan antara kegagalan pertama dan tingkat stabil, tanpa merubah jumlah breakdown sebelum mencapai tingkat stabil. Stabilisasi juga dapat dikaitkan dengan pemindahan ketidak teraturan permukaan. Suatu perubahan pada porositas penyaring minyak (dari 6 m m ke 15 m m) hanya merubah persentase perbedaan antara nilai pertama dan nilai stabil (Plateu).
- Kualitas Minyak
Makin kasar permukaan elektroda maka makin lama periode stabilisasi. Dari hasil pengamatan diperoleh bahwa elektroda yang mendapat perlakuan gosokan kertas ampelas kualitas 320 mencapai nilai stabil setelah 15 atau 20 kali kegagalan, dan yang digosok dengan kertas ampelas kualitas terbaik praktis menunjukkan tiadanya stabilisasi. Beberapa stabilisasi dikarenakan terutama oleh pemindahan secara kasar gas yang diserap oleh permukaan elektroda selama perlakuan awal (pretreatment).
- Ketidak murnian minyak dapat diklasifikasikan kedalam empat (4) kelompok yaitu:
- Partikel debu atau fiber terlah ada dalam cairan. Partikel ini menurunkan kekuatan dielektrik minyak dan partikel partikel ini dapat meloloskan diri dari proses filterasi jika ukurannya sangat kecil
- Partikel yang dihasilkan oleh discharge terdahulu yang biasanya berupa partikel karbon yang dihasilkan dari penguraian minyak atau partikel metalik yang dipindahkan dari permukaan elektroda oleh discharge.
- Air
- Bahan tambahan (additive) yang sengaja diberikan kedalam minyak untuk merubah sifat elektrisnya.
- Pengaruh Kapasitansi Eksternal.
- Pengaruh Lebar Celah dan Daerah Elektroda
Sumber impedansi yang terlihat pada pengujian lebar celah mencakup kapasitansi sumber tegangan dan kapasitansi dari dari sel pengujian. Kedua komponen ini mempengaruhi bentuk gelombang arus discharge pada saat breakdown. Komponen kedua dapa t dimodifikasi karena sel pengujian tergantung pada daerah elektroda dan lebar celah. Modifikasi dapat dilakukan dengan menambah secara paralel dengan sel pengujian berbagai macam nilai kapasitor.
Hasil pengamatan yang telah dilakukan oleh peneliti menunjukkan bahwa pengaruh celah mendekati 80 kV/cm/dekade perubahan. Variasi rata rata tegangan breakdown dengan logaritma lebar celah dapat dinyatakan dengan hubungan persamaan V = K d n, dimana K adalah konstanta, d adalah lebar celah dan n adalah faktor eksponensial yang bernilai antara 0 dan 1.
Kesimpulan
- Hasil pengujian kualitas minyak transformator tidak lepas dari sifat sifat listrik yang dimilikinya yaitu : permitivitas, resistivitas, faktor dissipasi daya dan kekuatan dielektrik.
- Pengujian minyak transformator dilakukan dengan menggunakan berbagai macam elektroda untuk mengetahui lebih rinci tentang kegagalan minyak transformator dalam kondisi tertekan, medan seragam maupun tak seragam.
- Aliran minyak terlihat penting dan mempengaruhi kegagalan minyak transformator walaupun dalam kecepatan yang hanya beberapa cm/detik.
- Membesarnya pengaruh lebar celah terhadap kekuatan dielektrik dikarenakan semakin cepatnya akumulasi partikel besar dalam celah yang memasuki volume tertekan melalui daerah medan seragam dan tak seragam pada pangkal elektroda.
- Percobaan dengan elektroda kuningan dan baja ringan menunjukkan bahwa kekuatan dielektrik tergantung pada beberapa macam faktor seperti stabilisasi, luasan elektroda, lebar celah, kecepatan pengaliran minyak dan kapasitani dari sel uji.
Daftar Pustaka
- Arismunandar : "Teknik Tegangan Tinggi" ; Pradnya Paramita, Jakarta 1990.
- Danikas M.G : "Breakdown of Transformer Oil"; IEEE Electtrical Insulation Magazines Vol.6 No.5, September/October 1990.
- Edminister Joseph A :"Elektromagnetika-Schaum Series"; Erlangga Jakarta 1990.
- Kawaguchi, Y, et. Al :"Breakdown of Transformer Oil"; IEEE Trans. On Power App. Syst.Vol. PAS-91 No.1 p.9-19, 19972
- Kind Deter :" Pengantar Teknik Eksperimental Tegangan Tinggi"; ITB Bandung 1993
- Kind Deter :" High Voltage Insulation Technology"; Firedr. Vieweg & Sohn, 1985
- Tareev, B.M. :" Material for Electrical Engineering"; High School Publishing House Moscow, 1995. q
Pengenalan Metode Ziegler-Nichols pada Perancangan Kontroler pada PID
Penalaan parameter kontroler PID (Proporsional Integral Diferensial) selalu didasari atas tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum penalaan parameter PID itu dilakukan. Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak diperlukan lagi, karena dengan menggunakan data yang berupa kurva keluaran, penalaan kontroler PID telah dapat dilakukan. Artikel berikut ini menerangkan salah satu metode pendekatan eksperimental penalaan kontroller PID, yakni metode Ziegler-Nichols serta dilengkapi dengan metode Quarter decay
Pendahuluan
Keberadaan kontroller dalam sebuah sistem kontrol mempunyai kontribusi yang besar terhadap prilaku sistem. Pada prinsipnya hal itu disebabkan oleh tidak dapat diubahnya komponen penyusun sistem tersebut. Artinya, karakteristik plant harus diterima sebagaimana adanya, sehingga perubahan perilaku sistem hanya dapat dilakukan melalui penambahan suatu sub sistem, yaitu kontroler.Salah satu tugas komponen kontroler adalah mereduksi sinyal kesalahan, yaitu perbedaan antara sinyal setting dan sinyal aktual. Hal ini sesuai dengan tujuan sistem kontrol adalah mendapatkan sinyal aktual senantiasa (diinginkan) sama dengan sinyal setting. Semakin cepat reaksi sistem mengikuti sinyal aktual dan semakin kecil kesalahan yang terjadi, semakin baiklah kinerja sistem kontrol yang diterapkan.
Apabila perbedaan antara nilai setting dengan nilai keluaran relatif besar, maka kontroler yang baik seharusnya mampu mengamati perbedaan ini untuk segera menghasilkan sinyal keluaran untuk mempengaruhi plant. Dengan demikian sistem secara cepat mengubah keluaran plant sampai diperoleh selisih antara setting dengan besaran yang diatur sekecil mungkin[Rusli, 1997].
Kontroler Proposional
Kontroler proposional memiliki keluaran yang sebanding/proposional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya) [Sharon, 1992, 19]. Secara lebih sederhana dapat dikatakan, bahwa keluaran kontroller proporsional merupakan perkalian antara konstanta proporsional dengan masukannya. Perubahan pada sinyal masukan akan segera menyebabkan sistem secara langsung mengubah keluarannya sebesar konstanta pengalinya.Gambar 1 menunjukkan blok diagram yang menggambarkan hubungan antara besaran setting, besaran aktual dengan besaran keluaran kontroller proporsional. Sinyal keasalahan (error) merupakan selisih antara besaran setting dengan besaran aktualmya. Selisih ini akan mempengaruhi kontroller, untuk mengeluarkan sinyal positip (mempercepat pencapaian harga setting) atau negatif (memperlambat tercapainya harga yang diinginkan).
Kontroler proporsional memiliki 2 parameter, pita proporsional (proportional band) dan konstanta proporsional. Daerah kerja kontroller efektif dicerminkan oleh Pita proporsional (Gunterus, 1994, 6-24), sedangkan konstanta proporsional menunjukkan nilai faktor penguatan terhadap sinyal kesalahan, Kp.
Hubungan antara pita proporsional (PB) dengan konstanta proporsional (Kp) ditunjukkan secara prosentasi oleh persamaan berikut:
Gambar 2 menunjukkan grafik hubungan antara PB, keluaran kontroler dan kesalahan yang merupakan masukan kontroller. Ketika konstanta proporsional bertambah semakin tinggi, pita proporsional menunjukkan penurunan yang semakin kecil, sehingga lingkup kerja yang dikuatkan akan semakin sempit[Johnson, 1988, 372].
Ciri-ciri kontroler proporsional harus diperhatikan ketika kontroler tersebut diterapkan pada suatu sistem. Secara eksperimen, pengguna kontroller proporsional harus memperhatikan ketentuan-ketentuan berikut ini:
- Kalau nilai Kp kecil, kontroler proporsional hanya mampu melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat.
- Kalau nilai Kp dinaikkan, respon sistem menunjukkan semakin cepat mencapai keadaan mantabnya.
- Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem bekerja tidak stabil, atau respon sistem akan berosilasi [Pakpahan, 1988, 193].
Kontroler Integral
Kontroller integral berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan mantap nol. Kalau sebuah plant tidak memiliki unsur integrator (1/s ), kontroller proporsional tidak akan mampu menjamin keluaran sistem dengan kesalahan keadaan mantabnya nol. Dengan kontroller integral, respon sistem dapat diperbaiki, yaitu mempunyai kesalahan keadaan mantapnya nol.Kontroler integral memiliki karakteristik seperti halnya sebuah integral. Keluaran kontroller sangat dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal kesalahan(Rusli, 18, 1997). Keluaran kontroler ini merupakan jumlahan yang terus menerus dari perubahan masukannya. Kalau sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan.
Sinyal keluaran kontroler integral merupakan luas bidang yang dibentuk oleh kurva kesalahan penggerak- lihat konsep numerik. Sinyal keluaran akan berharga sama dengan harga sebelumnya ketika sinyal kesalahan berharga nol. Gambar 3 [Ogata, 1997, 236] menunjukkan contoh sinyal kesalahan yang disulutkan ke dalam kontroller integral dan keluaran kontroller integral terhadap perubahan sinyal kesalahan tersebut.
Gambar 4 menunjukkan blok diagram antara besaran kesalahan dengan keluaran suatu kontroller integral.
Pengaruh perubahan konstanta integral terhadap keluaran integral ditunjukkan oleh Gambar 5. Ketika sinyal kesalahan berlipat ganda, maka nilai laju perubahan keluaran kontroler berubah menjadi dua kali dari semula. Jika nilai konstanta integrator berubah menjadi lebih besar, sinyal kesalahan yang relatif kecil dapat mengakibatkan laju keluaran menjadi besar (Johnson, 1993, 375).
Ketika digunakan, kontroler integral mempunyai beberapa karakteristik berikut ini:
- Keluaran kontroler membutuhkan selang waktu tertentu, sehingga kontroler integral cenderung memperlambat respon.
- Ketika sinyal kesalahan berharga nol, keluaran kontroler akan bertahan pada nilai sebelumnya.
- Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki (Johnson, 1993, 376).
- Konstanta integral Ki yang berharga besar akan mempercepat hilangnya offset. Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi dari sinyal keluaran kontroler (Guterus, 1994, 7-4).
Kontroler Diferensial
Keluaran kontroler diferensial memiliki sifat seperti halnya suatu operasi derivatif. Perubahan yang mendadak pada masukan kontroler, akan mengakibatkan perubahan yang sangat besar dan cepat. Gambar 6 menunjukkan blok diagram yang menggambarkan hubungan antara sinyal kesalahan dengan keluaran kontroller.
Gambar 7 menyatakan hubungan antara sinyal masukan dengan sinyal keluaran kontroler diferensial. Ketika masukannya tidak mengalami perubahan, keluaran kontroler juga tidak mengalami perubahan, sedangkan apabila sinyal masukan berubah mendadak dan menaik (berbentuk fungsi step), keluaran menghasilkan sinyal berbentuk impuls. Jika sinyal masukan berubah naik secara perlahan (fungsi ramp), keluarannya justru merupakan fungsi step yang besar magnitudnya sangat dipengaruhi oleh kecepatan naik dari fungsi ramp dan faktor konstanta diferensialnya Td (Guterus, 1994, 8-4).
Karakteristik kontroler diferensial adalah sebagai berikut:
- Kontroler ini tidak dapat menghasilkan keluaran bila tidak ada perubahan pada masukannya (berupa sinyal kesalahan).
- Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan kontroler tergantung pada nilai Td dan laju perubahan sinyal kesalahan. (Powel, 1994, 184).
- Kontroler diferensial mempunyai suatu karakter untuk mendahului, sehingga kontroler ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi kontroler diferensial dapat mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan stabilitas sistem (Ogata,, 1997, 240).
Kontroler PID
Setiap kekurangan dan kelebihan dari masing-masing kontroler P, I dan D dapat saling menutupi dengan menggabungkan ketiganya secara paralel menjadi kontroler proposional plus integral plus diferensial (kontroller PID). Elemen-elemen kontroller P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar(Guterus, 1994, 8-10).
Gambar 8 menunjukkan blok diagram kontroler PID.
Keluaran kontroller PID merupakan jumlahan dari keluaran kontroler proporsional, keluaran kontroler integral. Gambar 9 menunjukkan hubungan tersebut.
Karakteristik kontroler PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I dan D. Penyetelan konstanta Kp, Ti, dan Td akan mengakibatkan penonjolan sifat dari masing-masing elemen. Satu atau dua dari ketiga konstanta tersebut dapat disetel lebih menonjol dibanding yang lain. Konstanta yang menonjol itulah akan memberikan kontribusi pengaruh pada respon sistem secara keseluruhan (Gunterus, 1994, 8-10).
Penalaan Paramater Kontroler PID
Penalaan parameter kontroller PID selalu didasari atas tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum penalaan parameter PID itu dilakukan. Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak diperlukan lagi, karena dengan menggunakan data yang berupa kurva krluaran, penalaan kontroler PID telah dapat dilakukan. Penalaan bertujuan untuk mendapatkan kinerja sistem sesuai spesifikasi perancangan. Ogata menyatakan hal itu sebagai alat control (controller tuning) (Ogata, 1997, 168, Jilid 2). Dua metode pendekatan eksperimen adalah Ziegler-Nichols dan metode Quarter decay.Metode Ziegler-Nichols
Ziegler-Nichols pertama kali memperkenalkan metodenya pada tahun 1942. Metode ini memiliki dua cara, metode osilasi dan kurva reaksi. Kedua metode ditujukan untuk menghasilkan respon sistem dengan lonjakan maksimum sebesar 25%. Gambar 11 memperlihatkan kurva dengan lonjakan 25%.
Metode Kurva Reaksi
Metode ini didasarkan terhadap reaksi sistem untaian terbuka. Plant sebagai untaian terbuka dikenai sinyal fungsi tangga satuan (gambar 12). Kalau plant minimal tidak mengandung unsur integrator ataupun pole-pole kompleks, reaksi sistem akan berbentuk S. Gambar 13 menunjukkan kurva berbentuk S tersebut. Kelemahan metode ini terletak pada ketidakmampuannya untuk plant integrator maupun plantt yang memiliki pole kompleks.
Kurva berbentuk-s mempunyai dua konstanta, waktu mati (dead time) L dan waktu tunda T. Dari gambar 13 terlihat bahwa kurva reaksi berubah naik, setelah selang waktu L. Sedangkan waktu tunda menggambarkan perubahan kurva setelah mencapai 66% dari keadaan mantapnya. Pada kurva dibuat suatu garis yang bersinggungan dengan garis kurva. Garis singgung itu akan memotong dengan sumbu absis dan garis maksimum. Perpotongan garis singgung dengan sumbu absis merupakan ukuran waktu mati, dan perpotongan dengan garis maksimum merupakan waktu tunda yang diukur dari titik waktu L.
Penalaan parameter PID didasarkan perolehan kedua konstanta itu. Zeigler dan Nichols melakukan eksperimen dan menyarankan parameter penyetelan nilai Kp, Ti, dan Td dengan didasarkan pada kedua parameter tersebut. Tabel 1 merupakan rumusan penalaan parameter PID berdasarkan cara kurva reaksi.
| | | | |
| | | | |
| | | | |
| | | | |
Metode Osilasi
Metode ini didasarkan pada reaksi sistem untaian tertutup. Plant disusun serial dengan kontroller PID. Semula parameter parameter integrator disetel tak berhingga dan parameter diferensial disetel nol (Ti = ~ ;Td = 0). Parameter proporsional kemudian dinaikkan bertahap. Mulai dari nol sampai mencapai harga yang mengakibatkan reaksi sistem berosilasi. Reaksi sistem harus berosilasi dengan magnitud tetap(Sustain oscillation) (Guterus, 1994, 9-9). Gambar 14 menunjukkan rangkaian untaian tertutup pada cara osilasi.
Nilai penguatan proportional pada saat sistem mencapai kondisi sustain oscillation disebut ultimate gain Ku. Periode dari sustained oscillation disebut ultimate period Tu (Perdikaris, 1991, 433). Gambar 15 menggambarkan kurva reaksi untaian terttutup ketika berosilasi.
Penalaan parameter PID didasarkan terhadap kedua konstanta hasil eksperimen, Ku dan Pu. Ziegler dan Nichols menyarankan penyetelan nilai parameter Kp, Ti, dan Td berdasarkan rumus yang diperlihatkan pada Tabel 2.
| | | | |
| | 0,5.Ku | ||
| | 0,45.Ku | 1/2 Pu | |
| | 0,6.Ku | 0,5 Pu | 0,125 Pu |
Metode Quarter - decay
Karena tidak semua proses dapat mentolerir keadaan osilasi dengan amplituda tetap, Cohen-coon berupaya memperbaiki metode osilasi dengan menggunakan metode quarter amplitude decay. Tanggapan untaian tertutup sistem, pada metode ini, dibuat sehingga respon berbentuk quarter amplitude decay (Guterus, 1994, 9-13). Quarter amplitude decay didefinisikan sebagai respon transien yang amplitudanya dalam periode pertama memiliki perbandingan sebesar seperempat (1/4) (Perdikaris, 1991, 434).
Kontroler proportional Kp ditala hingga diperoleh tanggapan quarter amplitude decay, periode pada saat tanggapan ini disebut Tp dan parameter Ti dan Td dihitung dari hubungan (Perdikaris, 434, 1990). Sedangkan penalaan parameter kontroler PID adalah sama dengan yang digunakan pada metode Ziegler-Nichols (lihat tabel 1 - untuk metode kurva reaksi dan tabel 2 untuk metode osilasi).
Bersambung pada artikel
Kontroler PID-Ziegler-Nichols pada Sistem Kontrol posisi berbasis komputer IBM-PC.
Daftar Pustaka
- Rusli, Mohammad: 1997, Sistem Kontrol kedua, Malang: Teknik Elektro -Universitas Brawijaya
- Rameli, Mochammad, Rusdhianto E., Djoko Susilo: Sistem Pengaturan Malang, 1996
- Ziegler, J. G. dan N.B. Nichols, 1942, Optimum Setting for Automatic Controllers, Tans. ASME, vol. 64, pp. 759-768
- Gunterus, Frans: Falsafah Dasar: Sistem Pengendalian Proses, jakarta: PT. Elex Media Komputindo, Jakarta, 1994
- Johnson, Curtis: Process Control Instrumentation Technology, Englewood Cliffs, New Jersey, 1988
- Ogata, Katsuhiko: Teknik Kontrol Automatik – terjemahan: Ir. Edi Laksono, Erlangga, Jakarta, 1991
Ir. Chairuzzaini: Staf pengajar pada bidang Keilmuan Sistem Tenaga Listrik dan keilmuan Dasar Kelistrikan di jurusan teknik elektro, FT-Unibraw-Malang
Dipl. -Ing. Ir. Mohammad Rusli: Staf pengajar pada bidang Keilmuan Kontrol di jurusan Teknik Elektro - FT- Unibraw - Malang. E-mail:rusli@unibraw.wasantara.net.id
Rudy Ariyanto, ST : Sarjana teknik Elektro - Fakultas Teknik - Universitas Brawijaya -
Malang
Kanal Rayleigh Fading pada Komunikasi CDMA
Pada edisi ke-10 ELEKTRO INDONESIA dimuat tulisan tentang teori dasar CDMA. Tulisan ini akan membahas tentang kanal Fading yang sangat berpengaruh pada komunikasi bergerak, pada tulisan ini dibahas Kanal Rayleigh Fading yang merupakan model yang paling banyak dipakai untuk mensimulasikan suatu sistem. Sistem spread spectrum memiliki banyak kelebihan diantaranya mampu menghilangkan pengaruh akibat multipath fading. Pada time domain, perlawanan terhadap multipath berdasar pada fakta bahwa bentuk sinyal PN yang terdelay akan mempunyai korelasi yang lemah dengan sinyal PN yang asli, dan akan muncul sebagai pemakai yang tidak berkorelasi sehingga akan diabaikan oleh penerima. Fenomena Fading yang terjadi dapat dimodelkan secara matematis menurut distibusi Rayleigh, dan lebih dikenal dengan Rayleigh Fading Model. Multipath fading yang menjadi masalah pada sistem komunikasi bergerak dapat dikurangi dengan memakai sistem Direct Sequence-CDMA yang menggunakan penerima jamak dan mengatur penerima-penerima tersebut untuk mendapatkan sinyal yang diinginkan yang disebut RAKE Receiver.Fading
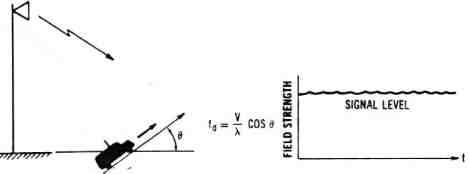
Fading merupakan karakterisktik utama dalam propagasi radio bergerak. Fading dapat didefinisikan sebagai perubahan fase, polarisasi dan atau level dari suatu sinyal terhadap waktu. Definisi dasar dari fading yang paling umum adalah yang berkaitan dengan mekanisme propagasi yang melibatkan refraksi, refleksi, difraksi, hamburan dan redaman dari gelombang radio. Pada sistem komunikasi bergerak terdapat dua macam fading yaitu short term fading dan long term fading.Short term fading sebagian besar disebabkan oleh pantulan multipath suatu gelombang transmisi oleh penghambur lokal seperti rumah-rumah, gedung-gedung dan bangunan lain atau oleh halangan lain seperti hutan (pepohonan) yang mengelilingi suatu unit bergerak tetapi tidak oleh gunung atau bukit yang terletak diantara lokasi pemancar dan penerima. Berikut beberapa kondisi yang memberikan gambaran mengenai fenomena short term fading tersebut.

Sr = A exp[j(2pftt - bx cos q )] (1) dimana : b= 2 p/l
ft = Frekuensi Transmisi
x = v * t (jarak perpindahan)
A = Amplitudo
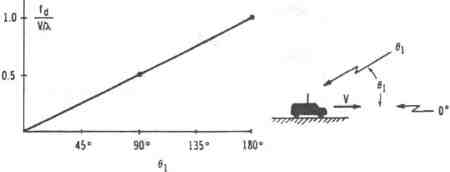
Amplitudo sinyal |Sr| = A pada baseband adalah konstan. Frekuensi diterima fr dapat ditunjukkan : fr = ft - v/l cos q (4)
Ketika unit penerima bergerak menjauhi sumber, q = 0, frekuensi diterima fr = ft - V/l.. Ketika penerima bergerak mengelilingi sumber, q = 90o, fr = ft. Ketika penerima bergerak menuju sumber, q = 180o dan fr = ft + V/l.
Dengan menggunakan persamaan (2) untuk tiap sinyal, sinyal yang diterima diberikan :
![]()
![]() (5)
(5)
Kondisi tiga ini merupakan dasar dari multipath fading.
Permasalahan Akibat Multipath
Dalam sistem komunikasi bergerak, perambatan sinyal antara pemancar dan penerima melalui berbagai lintasan yang berbeda. Lintasan yang berbeda-beda tersebut mengakibatkan kuat sinyal penerimaan menjadi bervariasi.Adanya multipath ini memungkinkan sinyal yang dikirim dapat diterima meskipun lintasan terhalang, tetapi disamping itu dengan adanya multipath kondisi lingkungan akan selalu berubah-ubah, hal ini sangat mempengaruhi pada penerimaan sinyal pada penerima ditambah dengan posisi penerima yang bergerak. Masalah yang dapat ditimbulkan karena adanya multipath antara lain multipath fading, delay spread, Doppler shift dan intersymbol interference.
Multipath Fading
Delay Spread
Intersymbol Interference
Namun apabila unit dalam keadaan bergerak, harga Rb : Rb = 1 / 2pL (7)
Doppler Shift
fd = v/l cos q (8)
dimana, v adalah kecepatan MS relatif terhadap BS, l merupakan panjang gelombang dari frekuensi pemancar dan q menunjukkan sudut datang. Doppler Shift dapat menyebabkan menurunnya kualitas suara.
Rayleigh fading
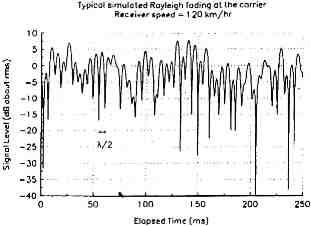
Pada kanal komunikasi bergerak, distribusi Rayleigh biasa digunakan untuk menjelaskan perubahan waktu dari selubung sinyal fading datar (flat fading) yang diterima, atau selubung dari satu komponen multipath. Telah diketahui bahwa selubung dari jumlah antara dua sinyal derau gaussian membentuk distribusi Rayleigh. Gambar 4 menunjukkan sebuah sinyal selubung yang terdistribusi secara Rayleigh sebagai fungsi waktu. Distribusi Rayleigh mempunyai fungsi kerapatan probabilitas (probability density function - pdf) diberikan oleh :![]() (9)
(9)
p(r) = 0 , untuk r yang lain.
dimana s adalah nilai rms dari level sinyal yang diterima sebelum detektor, dan s2 adalah daya waktu rata-rata dari sinyal yang diterima sebelum detektor. Probabilitas yang menunjukkan selubung dari sinyal yang diterima tidak melebihi suatu harga R yang spesifik ditunjukkan dengan cumulative distribution function (CDF) atau fungsi distribusi kumulatif :
![]() (10)
(10)
Nilai rata-rata rmean dari distribusi Rayleigh diberikan :![]() (11)
(11)
dan variance dari distribusi Rayleigh diberikan oleh sr2, yang merepresentasikan daya pada sinyal selubung. (12)
(12)![]()
Nilai rms dari selubung adalah akar dari rata-rata kuadrat, atau ![]() .
.
Median dari r dicari dari :![]() (13)
(13)
dan![]() (14)
(14)
Dari persamaan (11) dan (14) dapat diketahui bahwa mean dan median hanya berbeda 0.55 dB dalam sinyal Rayleigh fading. Ingat bahwa median sering digunakan dalam prakteknya, data fading biasanya didapat dari percobaan dan distribusi yang teliti tidak bisa diasumsikan. Dengan menggunakan median sebagai nilai rata-rata, dapat dengan mudah membandingkan distribusi fading yang berbeda yang mungkin mempunyai variasi rata-rata yang besar. Gambar 5 enunjukkan pdf Rayleigh.
Two-ray Rayleigh Fading
Gambar 6 menunjukkan blok diagram model kanal independen 2-ray Rayleigh fading. Respon impuls dari model adalah :
![]() (15)
(15)
dimana a1 dan a2 adalah independen dan terdistribusi secara Rayleigh, f1 dan f? independen dan terdistribusi seragam melalui 0 – 2 p , dan t adalah delay waktu antara kedua lintasan. Dengan mengatur a2 sama dengan nol, kondisi khusus dari satu kanal Rayleigh fading datar (flat rayleigh fading channel) diberikan :
![]() (16)
(16)
Dengan merubah-rubah t , dapat dilakukan untuk membuat range frekuensi yang lebar dari efek frekuensi selektif fading. Waktu korelasi yang tepat dari variabel random Rayleigh a1 dan a2 dapat dicapai dengan membangkitkan dua bentuk gelombang yang independen.
Rake Receiver
Dalam sistem spread spectrum CDMA, laju chip jauh lebih besar daripada lebar pita fading datar dari kanal. Dimana teknik modulasi konvensional memerlukan equalizer untuk menghilangkan interferensi intersimbol. Kode spreading CDMA dirancang untuk menghasilkan korelasi yang sangat rendah diantara chip yang dikirim. Dapat dilihat bahwa delay spread propagasi dalam kanal radio hanya menghasilkan versi jamak dari sinyal yang dikirim pada penerima. Jika komponen multipath tersebut memiliki delay yang lebih besar dari durasi chip, maka komponen tersebut akan muncul seperti noise yang tidak berkorelasi pada penerima CDMA.Komponen multipath tidak bisa begitu saja diabaikan. Karena adanya informasi yang penting dalam komponen multipath, penerima CDMA dapat menggabungkan sinyal yang terdelay dengan sinyal langsung untuk memperbaiki SNR pada penerima, sistem ini dinamakan RAKE Receiver. RAKE Receiver menggabungkan sinyal-sinyal asli yang terdelay dengan memakai penerima yang memiliki korelasi yang terpisah untuk tiap sinyal multipath.
Gambar 7 menunjukkan blok diagram RAKE Receiver untuk sinyal CDMA dimana komponen-komponen multipath tidak mempunyai korelasi antara satu dengan lainnya ketika delay propagasi lebih dari periode chip.
Sebuah RAKE Receiver menggunakan korelator lebih dari satu untuk mendeteksi M komponen multipath yang terkuat. Output dari setiap korelator mempunyai bobot untuk memberikan perkiraan yang lebih baik dibandingkan dengan satu komponen. Demodulasi dan pengambilan keputusan bit (bit decision) tergantung pada output dari korelator M.
Di luar ruangan (outdoor), delay antara komponen multipath mempunyai nilai cukup besar dan jika laju chip telah ditentukan, autokorelasi yang rendah dari spread spectrum CDMA dapat membuktikan bahwa antara komponen multipath akan tidak berkorelasi satu sama lain.
Diasumsikan terdapat M korelator yang digunakan dalam penerima CDMA untuk menangkap M komponen multipath yang terkuat. Pemberian bobot digunakan untuk memberikan kombinasi linier dari output korelator untuk deteksi bit. Korelator 1 telah disinkronkan untuk multipath yang terkuat m1. Komponen multipath m2 datang lebih lambat t daripada komponen m1. Korelator kedua disinkronkan untuk m2. Korelator ini mempunyai korelasi yang erat dengan m2 tetapi mempunyai korelasi yang rendah dengan m1. Perlu diingat bahwa jika hanya menggunakan satu korelator pada penerima, jika output dari korelator tersebut rusak karena fading, penerima tidak dapat membetulkan kerusakan tersebut. Pengambilan keputusan bit yang berdasarkan penggunaan satu korelator akan menghasilkan bit error rate (BER) yang tinggi. Pada RAKE Receiver, jika output dari satu korelator rusak oleh fading, korelator yang lain mungkin tidak rusak, dan sinyal yang rusak tidak dihitung pada saat proses pemberian bobot. Keputusan yang diambil berdasar pada kombinasi dari M keputusan statistik terpisah yang ditawarkan oleh RAKE Receiver dapat mengatasi pengaruh akibat fading dan memperbaiki penerimaan CDMA.
M keputusan statistik diberi bobot untuk membentuk semua keputusan statistik seperti ditunjukkan gambar 8 Output dari M korelator dinotasikan sebagai Z1, Z2, Z3, ..., ZM. Masing-masing diberi bobot a1,a2,a3,…,aM. Koefisien bobot yang diberikan berdasarkan pada kuat sinyal atau SNR dari tiap output korelator. Jika kuat sinyal atau SNR yang keluar dari korelator kecil, akan diberikan faktor bobot yang kecil pula. Total keluaran Z' dapat diberikan :
 (17)
(17)
Koefisien bobot aM, dinormalisasi dengan kuat sinyal output dari korelator dan output dari korelator tersebut dijumlahkan semua, seperti ditunjukkan :
 (18)
(18)
Seperti pada equalizer adaptif dan penggabungan diversitas, ada banyak cara untuk membangkitkan koefisien bobot. Berdasar pada interferensi multiple akses, cabang RAKE dengan amplitudo multipath yang kuat tidak akan diperlukan untuk menghasilkan output yang kuat setelah proses korelasi. Pemilihan koefisien bobot berdasar pada output dari korelator menghasilkan kinerja RAKE Receiver yang lebih baik.
Penutup
Membuat permodelan secara matematis sangat perlu dilakukan untuk mengetahui performansi suatu sistem, dalam tulisan ini saya mencoba memberikan aspek matematis dari suatu fading dimana salah satu permodelan fading dalam komunikasi bergerak adalah Rayleigh Fading. Pada tulisan mendatang akan ditampilkan hasil dari simulasi sistem spread spectrum dengan menggunakan RAKE Receiver untuk mengurangi gangguan akibat Multipath Fading. Tulisan ini diharapkan dapat dipakai sebagai bahan tambahan untuk penelitian pada sistem komunikasi spread spectrum.Daftar Pustaka- Alan V. Oppenheim, Signals and Systems, Prentice Hall India, Private Limited, 1990.
- Bernard Sklar, Rayleigh Fading Channels in Mobile Digital Communication Systems Part I:Characterization, IEEE Communication Magazine, July 1997.
- Brian D. Woerner, J. H. Reed, T.S. Rappaport, Simulation Issues for Wireless Modems, IEEE Communications Magazine Vol. 32 No. 7, July 1994.
- G.R. Cooper, C.D. Gillem, Modern Communications and Spread Spectrum, McGraw Hill Book Co, Singapore 1988.
- John G. Proakis, Digital Communication, McGraw-Hill Publishing Company 1983.
- K.Sam Shanmugam, Digital and Analog Communication System, John Wiley & Sons, Inc. 1979.
- K. Thompson, D. Whippler, Concepts of CDMA, Wireless Communication Symposium, Hewlett Packard Company, 1993.
- R. L. Peterson, R.E. Ziener, D.E. Burth, Introduction to Spread Spectrum Communication, Prentice Hall, 1995.
- Theodore S. Rappaport, Wireless Communication Principles and Practise, Prentice Hall PTR Upper Sadle River, New Jersey 07458, 1996.
- William C.Y. Lee, Mobile Communication Design Fundamentals, second Edition. New York : Wiley and Sons, Inc. 1993. q
Aplikasi Sistem Kontrol Optimal dalam Reaktor Nuklir
Sistem kontrol merupakan sebuah sistem yang terdiri atas satu atau beberapa peralatan yang berfungsi untuk mengendalikan sistem lain yang berhubungan dengan sebuah proses. Dalam suatu industri, semua variabel proses seperti daya, temperatur dan laju alir harus dipantau setiap saat. Bila variabel proses tersebut berjalan tidak sesuai dengan yang diharapkan, maka sistem kontrol dapat mengendalikan proses tersebut sehingga sistem dapat berjalan kembali sesuai dengan yang diharapkan. Sistem kontrol dapat digunakan di dalam pabrik, gedung-gedung maupun dalam PLTN.Sistem kontrol sudah berkembang sejak awal abad ke 20, yaitu dengan ditemukannya sistem kontrol proporsional, integral dan sistem kontrol differensial. Dalam perkembangannya, ketiga sistem kontrol tersebut digabung menjadi satu, menjadi sistem kontrol PID ( Proporsional, Integral, Differensial ).
Untuk mengendalikan sistem proses yang sangat komplek, seperti PLTN dan jaringan distribusi listrik terpadu, maka sistem kontrol PID mempunyai banyak kelemahan. Sistem kontrol PID hanya dapat digunakan untuk sistem proses yang berbentuk linier dengan satu masukan dan satu keluaran ( SISO ). Untuk mengatasi hal ini, maka dikembangkan sistem kontrol yang lebih canggih, yaitu sistem kontrol optimal.
Sistem Kontrol Optimal
Yang dimaksud dengan optimal yaitu hasil paling baik yang dapat dicapai dengan memperhatikan kondisi dan kendala dari sistem tersebut. Dalam sistem kontrol optimal, maka istilah optimal seringkali merujuk pada minimal. Misalnya meminimalkan bahan bakar (input), waktu dan kesalahan (error).Supaya sistem proses tersebut dapat dikontrol, maka perlu dibuat model matematis yang menghubungkan antara masukan (input), proses dan keluaran (output). Pada sistem kontrol optimal, model yang banyak digunakan adalah model persamaan keadaan. Dalam persamaan keadaan, persamaan differensial dari sistem yang semula berorde n diubah menjadi n persamaan differensial berorde satu secara simultan dan ditulis dalam notasi vektor matrik. Metode persamaan keadaan banyak digunakan dalam menganalisis suatu sistem, karena metode tersebut mempunyai banyak keuntungan yaitu:
- Notasinya mudah dan kompak, dan dapat dibentuk ke dalam persamaan matrik dan vektor.
- Notasinya seragam untuk semua sistem tanpa mempedulikan tingkat, maka dapat diselesaikan dengan menggunakan teknik algorithma dan komputer dengan mudah.
- Dapat digunakan untuk mengetahui karakteristik dan tingkah laku sistem secara lebih lengkap.
Bentuk umum dari persamaan keadaan adalah sebagai berikut:
X = A.X + B.U
X= variabel keadaan.
U = input ( masukan ).
A = matrik yang mempengaruhi harga variabel keadaan.
B = matrik yang mempengaruhi harga masukan.
Masalah umum dalam perancangan suatu sistem kontrol adalah pencapaian spesifikasi rancangan yang telah ditentukan. Hal lain yang juga perlu diperhatikan adalah bagaimana spesifikasi rancangan ini dapat dicapai. Sistem kontrol yang baik adalah sistem kontrol yang mempunyai daya tanggap yang cepat dan stabil, tetapi tidak memerlukan energi yang berlebihan. Sistem kontrol demikian dapat dicapai melalui pengaturan indeks performansi yang tepat. Sistem kontrol yang dirancang berdasarkan optimasi indeks performansi disebut sistem kontrol optimal.
Indeks performansi suatu sistem kontrol optimal merupakan indikator dari kumpulan deviasi suatu sistem dari keadaan ideal atau keadaan yang diinginkan. Indeks performansi dapat digunakan untuk meminimalkan energi, kesalahan dan waktu. Bila hanya bagian tertentu dari sistem yang akan dioptimalkan, maka indeks performansinya dipilih sesuai dengan bagian yang akan dioptimalkan tersebut. Bentuk umum dari indeks performansi adalah sebagai berikut:
J = indeks performansi.
L (X,U,t) = fungsi kuadratik dari X, U dan t
t = waktu
Pada sistem kontrol optimal, optimasi kontrol dicapai dengan meminimalkan nilai indeks performansi tersebut. Ada beberapa metode yang dapat digunakan untuk meminimalkan indeks performansi yaitu:
Kalkulus variasi: digunakan untuk mengoptimalkan sistem proses yang sederhana.
- Persamaan aljabar Riccati: digunakan untuk mengoptimalkan sistem proses yang
- Persamaan Hamilton Pontryagin: dapat digunakan untuk mengoptimalkan sistem proses yang berbentuk linier mupun non linier
berbentuk linier.
Dinamika Reaktor Nuklir
Reaktor nuklir merupakan tempat untuk mengadakan reaksi fisi (pembelahan).Bahan bakar yang biasa digunakan adalah Uranium yang merupakan zat radio aktif. Operasi reaktor dilakukan dengan jalan memberikan neutron kedalam bahan bakar sehingga terjadi reaksi fisi. Dari reaksi fisi tersebut dihasilkan neutron, energi yang sangat besar dan inti -inti baru yang tidak stabil. Dengan adanya neutron-neutron baru tersebut, maka reaksi fisi dapat dilanjutkan sehingga terjadilah reaksi berantai. Pada reaktor riset, neutron yang dihasilkan digunakan untuk penelitian, sedangkan energinya dibuang. Dalam reaktor daya ( reaktor untuk PLTN ), energi yang dihasilkan digunakan untuk memutar turbin sehingga dihasilkan tenaga listrik yang sangat besar.
Untuk model reaktor titik, dimana fluks neutron tidak bergantung pada tempat dan energi neutron berada dalam satu kelompok, maka dapat dibuat persamaan keadaan dinamika reaktor sebagai berikut:
P = daya
C = precursor
b = fraksi neutron kasip
L = umur generasi neutron
l = konstanta peluruhan neutron
U = input ( masukan ).
Karena daya reaktor dan precursor dari waktu ke waktu selalu berubah, maka daya reaktor dan precursor merupakan variabel keadaan. Jadi P = X1 dan C = X2.
Maka persamaan di atas dapat ditulis dalam bentuk persamaan keadaan sebagai berikut:
Dengan menggunakan harga awal sebagai berikut:
- X1(0) = 10 Watt
- X2(0) = 0
-
 = 0,0073
= 0,0073 -
 = 0,0768 detik -1
= 0,0768 detik -1 -
 = 0,00096 detik
= 0,00096 detik -
 = 0,5 detik.
= 0,5 detik. - U = 0,0539
J = 0,0378 .
| | | |
| 0 1 2 3 4 5 6 7 8 9 10 11 12 | | |
Kenaikan daya reaktor sebagai fungsi waktu
Optimasi Daya Reaktor
Persamaan dinamika reaktor merupakan persamaan keadaan non linier. Untuk mengoptimalkan daya reaktor maka dapat digunakan persamaan Hamilton Pontryagin. Persamaan Hamilton Pontryagin merupakan pengembangan dari persamaan Kalkulus variasi, teknik Multiplikasi Lagrange dan persamaan Euler. Persamaan Hamilton Pontryagin dapat digunakan untuk mengoptimalkan sistem proses yang bersifat komplek dengan banyak kendala. Persamaan Hamilton Pontryagin juga dapat digunakan untuk mengoptimalkan sistem proses yang bersifat linier maupun non linier.Langkah-langkah untuk mengoptimalkan daya reaktor dengan menggunakan persamaan Hamilton Pontryagin adalah sebagai berikut:
- Persamaan Hamilton Pontryagin:
H(X,U,p,t) = L(X,U,t) + pt (A.X + B.U)
- Persamaan Costate:

- Kondisi Stasioner:

J = 0,00588.
| | | | |
| 0 1 2 3 4 5 6 7 8 9 10 11 12 | | | |
Kenaikan daya reaktor sebagai fungsi waktu setelah dioptimalkan.
Kesimpulan
Dari uraian diatas maka dapat ditarik kesimpulan sebagai berikut:- Dengan menggunakan persamaan Hamilton Pontryagin, maka indeks performansi yang diperlukan untuk menaikkan daya reaktor dapat diperkecil. Jadi persamaan Hamilton Pontryagin dapat digunakan untuk mengoptimalkan daya reaktor.
- Dalam sistem kontrol optimal, persamaan yang digunakan untuk memodelkan sistem proses adalah persamaan keadaan. Dengan demikian maka semua variabel keadaan dari sistem proses dapat dipantau dan harganya dapat diketahui setiap saat.
- Sistem kontrol optimal dapat digunakan untuk mengendalikan sistem proses yang bersifat MIMO ( Multi Input Multi Output ), yaitu sistem proses dengan banyak masukan dan banyak keluaran. Sedangkan sistem kontrol klasik tidak dapat digunakan untuk mengendalikan sistem proses yang demikian.
- Dengan semakin kompleknya industri seperti PLTN dan jaringan distribusi listrik, maka sistem kontrol yang canggih sangat diperlukan. Dengan demikian maka sistem kontrol optimal perlu dikembangkan karena mempunyai prospek yang baik dimasa yang akan datang.
Daftar Pustaka
- Brogan, W.L., Modern Control Theory , Prentice-Hall, Inc., New Yersey, 1985.
- Lewis, F.L., Optimal Control, John Wiley & Sons,Inc., New York, 1985.
- Lewis, E.E., Nuclear Power reactor Safety, John Wiley & Sons, Inc., New York, 1977.
- Hasan, Optimasi Reaktivitas pada sistem pengaturan daya reaktor zero power dengan menggunakan persamaan Hamilton Pontryagin,Tesis, ITB, Bandung, 1994.

